![]()
建設ロボティクスの未来
2016.02.25
ArchiFuture's Eye 慶應義塾大学 池田靖史
昨年末に東京大学小渕研究室などが進めるT-ADSの公開シンポジウムで建設ロボティクスの世
界をリードするETH(スイス連邦工科大学チューリッヒ校)の建築家マティアス・コーラー教授
とお話できる機会があった。数年前からずっと注目し続けて来て、一昨年にETHを訪問した時
にはご不在だったので、パネリストとして一緒に壇上にあがっただけでも感激だが、そこで紹
介いただいた技術の先進性には改めて感心した。
ロボットアームが高精度にブロックを配置できるよう制御して美しい曲面に積み上げる事に始
まり、プラスチックの細かい立体メッシュを編ませて曲面コンクリートの型枠にするプロジェ
クト、クレーンの制御で巨大な3軸ミリングマシンを構成し、大スパンの木造トラスを組み立
てた実施プロジェクトなど、どれも、アイデアだけでなくロボット制御技術全般で非常に高い
蓄積を持っている事が伺われる。なかでも先進的なのは縄の先を持った複数のドローンが飛び
回って吊り橋を編む実験で、この場合には所定の位置を正確に飛ぶだけでなく、他のドローン
の位置や縄のたるみ具合などの誤差を常にフィードバックして調製する協調的な飛行技術も実
現されなければならない。ロボティクスは判断能力のある物へと進化している。
ロボットには気の毒だが崖の上の足場なしの危険作業は深海や放射線地域と同じように人間に
とってはとても有益な応用方法だろう。ロボットによる建築技術が高精度な仕上りではなく、
むしろ鷹揚な現場合わせの妙技に向いているかもしれないという方向性はロボットの知能が強
化されたことから出て来た自己組織的な建築技術への流れとして様々な研究が始まったところ
である。たとえばカリフォルニア芸術大学のデジタル・クラフト・ラボによるSwarmscapers
という接着剤を撒きながら走り回る小型走行ロボットの群れは、おがくずの中から動物の巣の
ように固めていくことで、事前に計画された形態どおりではなく状況に合わせて自律的に建設
することが狙いである。
そもそもT-ADSの研究活動のほうも羨ましいほど挑戦的で未来の可能性を感じさせる試みであ
る。ここでの紹介だけでなくぜひ情報にアクセスしてみていただきたいが、人間の身体的限界
を前提にした手作業とコンピューターの情報処理能力を活用したその支援がテーマであり、結
果として生まれる協調的な相互作用としての建築行為というのが私の解釈である。そのために
施工済み部分の状況をスキャンしてコンピューター上のモデルにフィードバックし次の施工部
分を補完的に変形する事などが試みられている。この先には人間のアドリブとそれを受け止め
てコンピューターが反応するようなものづくりの感覚が示されているのだと思う。
パネルディスカッションの終盤で人間がするべき作業とロボットがするべき作業をどのように
区別するべきなのか、(あるいは人間は何もしなくなるのか)という質問が会場からされた。
私は迷わず「ものづくりは楽しい。ロボットには建築作業を楽しむ事はできない、それだけは
人間の特権だ」と答えると、マティアス教授は「ロボットに建築作業をさせるのは人間の楽し
みだけどね」と応じていた。
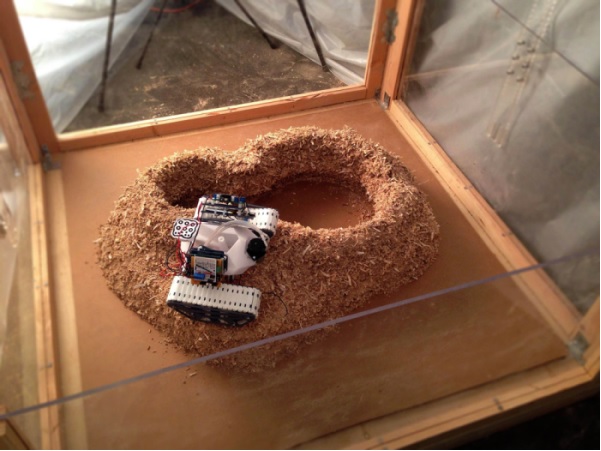
カリフォルニア芸術大学のデジタル・クラフト・ラボによるSwarmscapers

ETHのドローンによる吊り橋を編む実験の様子

T_ADSがデジタル・ファブリケーションを応用して建設した実験的パビリオン