![]()
ドローンとMR技術による未来の景観体験
2024.10.03
パラメトリック・ボイス 大阪大学 福田 知弘
2つの自己位置推定法で実現する自由視点の景観シミュレーション
現実の風景に3D設計モデル(仮想モデル)を重ねて、将来の景観を体験できるMR(複合現
実)の技術では、通常、ユーザはヘッドマウントディスプレイ(HMD)というゴーグルのよ
うなデバイスを装着したり、スマートフォンやタブレットなどを使います。この場合、MRの
体験は、ユーザがデバイスを通じて見える範囲、つまりユーザの近くに限られてしまうこと
が多いです。
この課題を解決するために、ドローンを使ってMR技術を拡張することで、ユーザがより広い
視点で景観を楽しむことができるようになります。これにより、都市計画やインフラの整備、
災害対応や人道支援、文化財の保護、観光、さらには環境保全など、さまざまな社会的な課題
に役立つ可能性があります。
本研究では、ドローンが任意のルートを飛行しながら、現実の風景と仮想モデルを正確に重ね
合わせるシステムを開発しました。このシステムは、2つのビジュアルベースの位置推定技術
を組み合わせています。1つはVPS(ビジュアルポジショニングシステム)という技術を使い、
カメラ画像からドローンの位置や向きを推定する方法です。もう1つは、風景にある特徴を
使ってカメラの動きを追跡する方法(自然特徴ベースのトラッキング法)です。
ドローン視点のMR技術とその課題
本研究では、ユーザが自由に操縦するドローンの位置を正確に把握し、その動きと仮想世界の
動きを一致させること(位置合わせ)を目指しています。
最近では、ドローンとMR技術の組み合わせがさまざまな分野で注目されており、いくつかの
応用例もすでに提案されています。特に、都市や建物などの大きな空間をシミュレーションす
る際には、ユーザの動きに制限されないドローン視点のMRによる可視化が非常に役立ちます。
しかし、現在のところ、こうした技術を使う場合、特別なドローンや専用のソフトウェアが必
要であることが多く、汎用性が低くなり、使える場面が限られてしまうという課題がありま
す。
この問題に対して、過去の研究*1では、画面共有やストリーミング配信といった汎用的な技
術を使って、市販のドローンとMRを統合する方法が提案されました。しかし、この方法では、
ドローンの飛行ルートをあらかじめ決めておく必要があり、MRの実行中にルートを変更でき
ないという制約がありました。
提案システムの概要と精度の評価
図1に、この研究で提案するシステムの概要を示しています。従来の研究*1と同様に、ドロー
ンの映像(現実世界)をゲームエンジンに取り込み、仮想世界の映像と重ね合わせて表示しま
す。表示されたMRの映像は、ストリーミングでユーザに配信されます。本研究では、現実世
界と仮想世界の映像を正確に重ねるために、(iii)(iv)に示すようにVPSと自然特徴ベース
のトラッキングを組み合わせています。
これらのビジョンベースの技術は、GPSのような特別なセンサを使わず、一般的なドローンに
搭載されているカメラの画像と内部パラメータのみを利用するため、特別な機体や専用のソフ
トウェアを使わずに実装が可能です。
図2はゲームエンジンに定義したモデルを示しており、図3では、提案するシステムと従来の
システムで、MRを行った際の位置合わせの精度を比較しています。各行において、赤い領域
が左の図(正解)に近いほど、精度が高いことを示しています。中列が提案システム、右列
が従来システム*1の結果です。また、図4では「IoU(Intersection over Union)」という
指標を用いて、これを定量的に評価した結果をグラフ化しています。IoUは0から1の値をと
り、1に近いほど精度が高いことを意味します。
これらの結果から、提案システムは従来のシステム*1よりも高精度な位置合わせができるこ
とが確認されました。さらに、従来システムでは時間の経過とともに精度が低下する傾向が見
られましたが、提案システムでは安定した高精度が維持されました。このシステムを使えば、
ドローンがどのようなルートを飛んでも、高い精度でMRが実行できるようになると考えられ
ます。
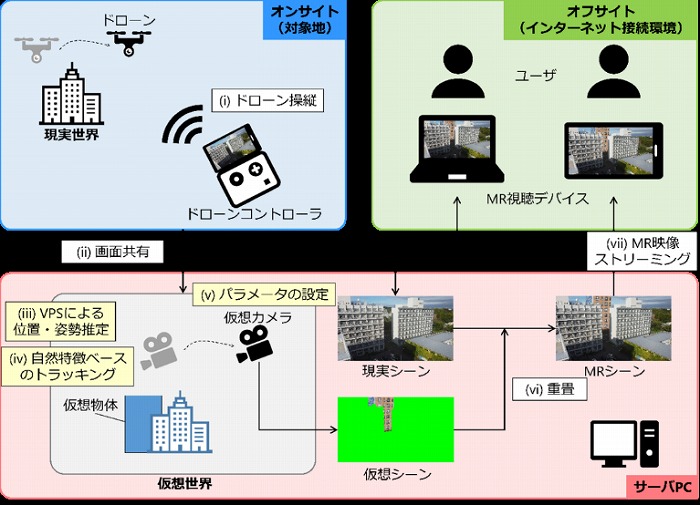
図1 提案システムの概要。従来の方法では事前に決めた飛行ルートに従ってドローンを飛ばし
ていましたが、提案システムではVPSと自然特徴ベースのトラッキングを使ってドローン
の位置を推定し、現実世界と仮想世界を正確に重ね合わせます。
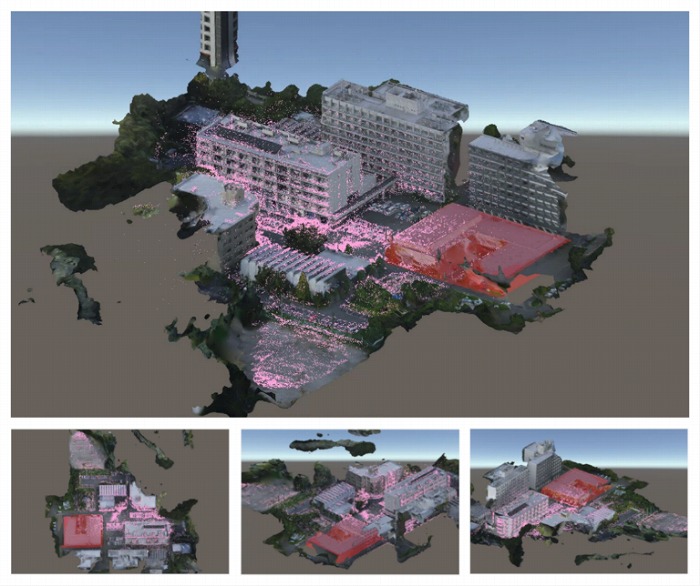
図2 ゲームエンジンに定義したモデル。大阪大学吹田キャンパスのテクスチャ付き3Dモデル
は、ストラクチャー・フロム・モーション(SfM)を用いて作成されました。ピンク色の
点はVPSによって得られた3Dマップの特徴点を示し、赤色の点は実験の対象となる部分
を示しています。
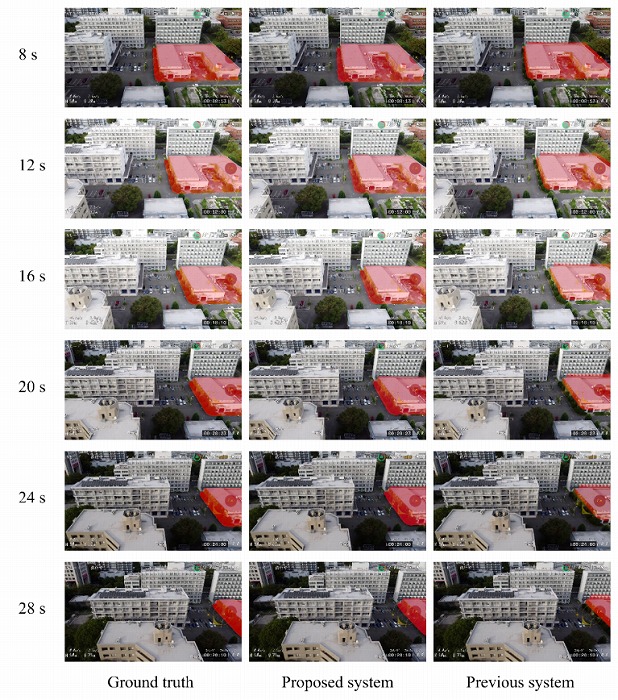
図3 提案システムと従来システムの位置合わせ精度の比較。右列の従来システムと比べて、提
案システムの方が精度が高いことがわかります。
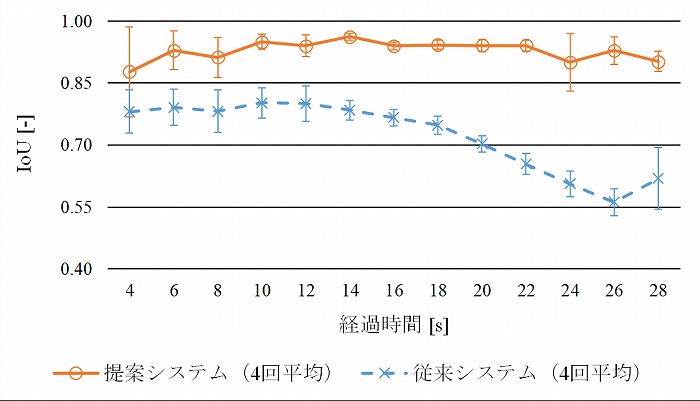
図4 IoU指標を用いて、図3の結果を数値で評価し、グラフで表現しています。1に近いほど精
度が高いことを示します。
ドローン視点MR技術の未来と展望
最近、建築や土木(AEC)分野では、ドローンの導入が進んでいます。ドローンは、時間短縮
や高い精度、安全性の向上、コスト削減といった利点があるためです。そして、今後さらにこ
の分野でドローンが広く使われるためには、MRなどの最新技術と組み合わせることが重要だ
と考えられています。
今回の研究で提案した位置合わせシステムは、汎用性が高く、今後さまざまな機能を追加でき
る可能性があります。これにより、建築プロジェクトの初期段階(設計・計画)から、後の段
階(保守・点検)に至るまで、幅広い場面で活用できるドローン視点のMR技術の実現に近づ
いたといえます。
この研究成果は、学術雑誌「Drone Systems and Applications(Canadian Science
Publishing社)」に掲載されました *2。
また、2024年6月10日に大阪大学よりプレスリリースしました *3。
*1 Kikuchi, N., Fukuda, T., Yabuki, N. (2022). Future landscape visualization using a
city digital twin: integration of augmented reality and drones with implementation of
3D model-based occlusion handling, Journal of Computational
Design and Engineering, Volume 9, Issue 2, 837–856,
*2 Kinoshita, A., Fukuda, T., Yabuki, N. (2024). Drone-based mixed reality: enhancing
visualization for large-scale outdoor simulations with dynamic viewpoint adaptation
using vision-based pose estimation methods, Drone Systems and Applications, 12,
*3 \自由な視点で楽しめる複合現実感!/ 一般的なドローンでも体験できるMRシステム:
2つのビジョンベース自己位置推定法で正確な位置合わせ(大阪大学 ResOU[リソウ]・プレ
スリリース)
最新の記事